Next:
3次元の極座標変換を2つの3次元円柱座標変換に分解する方法
Up:
Laplacian と極座標
Previous:
3.0.0.1 問題
4
Laplacian の極座標表示
,
における Laplacian
の極座標表示を 書いておく。
証明
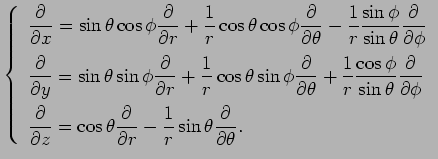
. ヤコビ行列
は、
とおくとき、
と表される。
,
,
は
の正規直交基底で あることに注意すると、簡単な計算で
であることが確かめられる。ゆえに
これから
ゆえに
これらを加えて
このように、 (
5
) を得るために、 すべてを連鎖律で計算していくのはとても大変なので
3
、 色々な工夫が考えられている。
Subsections
3次元の極座標変換を2つの3次元円柱座標変換に分解する方法
グリーンの公式を利用する方法
Next:
3次元の極座標変換を2つの3次元円柱座標変換に分解する方法
Up:
Laplacian と極座標
Previous:
3.0.0.1 問題
桂田 祐史
![\begin{jexample}[平面極座標の Laplacian]
平面の極座標
\begin{displa...
...後はこれをていねいに計算するだけである。 \qed
\end{jexample}](img102.png)


![$\displaystyle J^{-1}=\left(
\begin{matrix}
\Vector{a}^T \\
\dfrac{1}{r}\Vector{b}^T [2ex]
\dfrac{1}{r\sin\theta}\Vector{c}^T
\end{matrix}\right)
$](img110.png)













![\begin{jexample}[空間極座標の Laplacian]
空間の極座標
\begin{displa...
...u}{\rd\varphi^2}
\right)
\nonumber
\end{align}となる。 \qed
\end{jexample}](img103.png)